**Microrrobôs em Enxame: Unidos para Manipular Objetos sem Toque Físico**
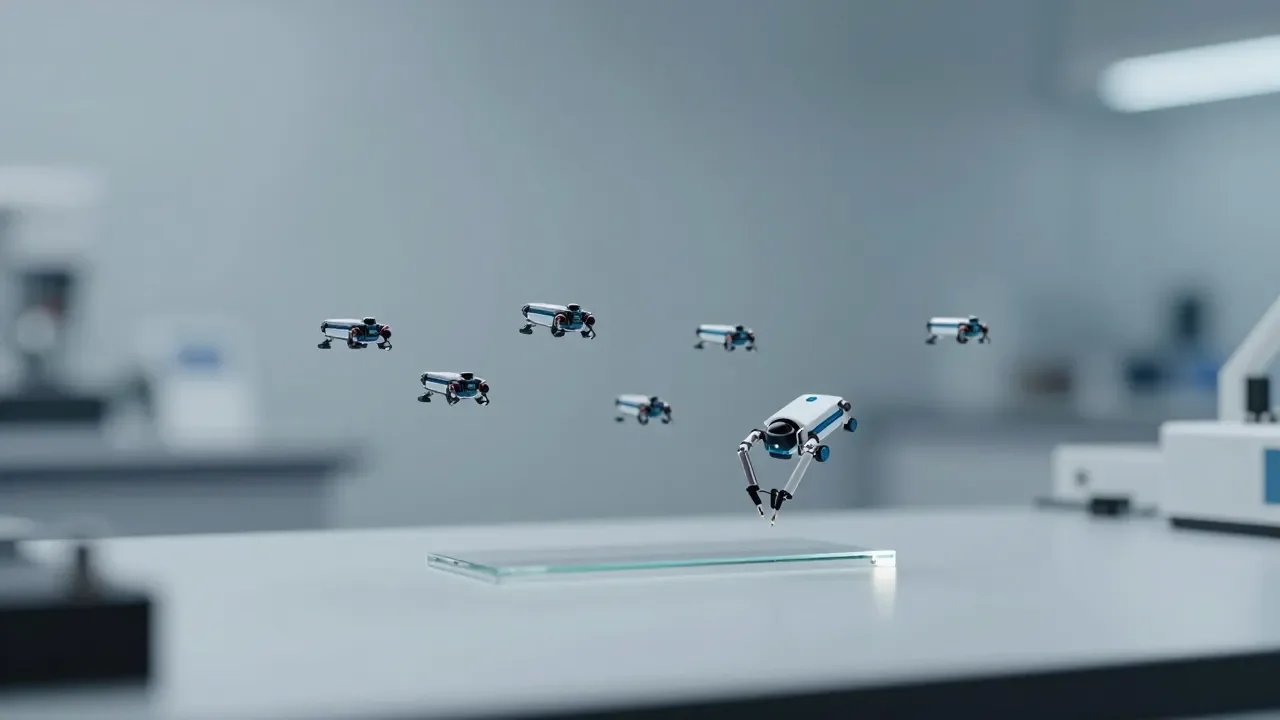
O lema americano "E pluribus unum" — "de muitos, um" — vai além da bandeira dos Estados Unidos e serve como inspiração perfeita para microrrobôs. Uma parceria entre pesquisadores da Universidade Cornell e do Instituto Max Planck de Sistemas Inteligentes revelou como um grupo desses minúsculos robôs, girando na superfície da água, consegue gerar coletivamente o torque fluídico essencial para movimentar estruturas passivas, tudo isso sem qualquer contato direto.
Essa capacidade coletiva dos microrrobôs foi colocada em prática em demonstrações impressionantes: eles acionaram engrenagens e deslocaram objetos flutuantes, aproveitando o movimento sincronizado de rotação para criar fluxos de água que exercem força à distância. O mecanismo depende da ação conjunta do enxame, onde cada robô contribui com seu giro individual na interface água-ar, amplificando o efeito hidrodinâmico até produzir o torque necessário para tarefas precisas.
O objetivo dessa inovação é claro e ambicioso: pavimentar o caminho para aplicações em escala microscópica, como procedimentos biomédicos delicados, onde o manuseio sem contato físico pode revolucionar intervenções mínimas e manipuladores em ambientes confinados. Essa abordagem destaca o poder da colaboração em enxames robóticos, transformando esforços individuais em ações coordenadas e eficientes.